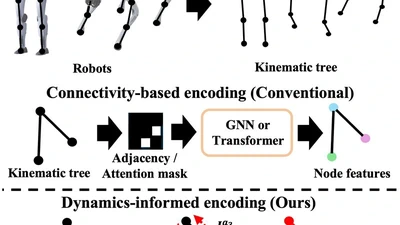
Articulated-Body Dynamics Network: Dynamics-Grounded Prior for Robot Learning
Recent work in reinforcement learning has shown that incorporating structural priors for articulated robots, such as link connectivity, into policy networks improves learning …
sangwoo-shin