DASH Robot: Minimalistic Design and Optimal Aerial-Terrestrial Locomotion via Contact-Implicit Control
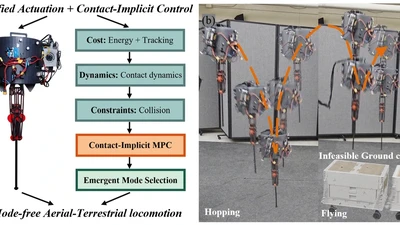
We present a novel and minimalistic design of an aerial-terrestrial robot DASH: Ducted Aerial Spring Hopper. The goal is to enable both aerial and ground locomotion capabilities on …
ryan-gomes-paiva