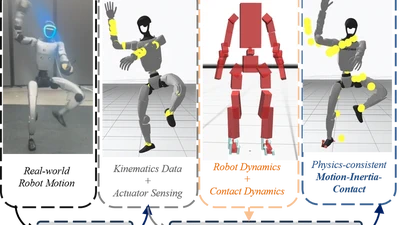
PRIME: Physically-consistent Robotic Inertial and Motion Estimation for Legged and Humanoid Robots
We propose PRIME, an estimation/identification method using smoothed contact dynamics to reconstruct consistent motion, inertial parameters, and contact forces from kinematics and …
jiarong-kang
