Optimization and Reinforcement Learning for Legged Robots
Kunzhao Ren
rkzdtc@gmail.com | +1 608 590 6494
Madison, WI
Legged Robots | MPC | RL | WBC | RWM
Overview
- Background
- Research Experience
- Publications & Patents
- Future Directions
Education Background
| University of Wisconsin-Madison | Ph.D. in ME, GPA 3.75 | 2025.8 – Present |
| Zhejiang University | M.Eng. in EI | 2022.9 – 2025.6 |
| Xi’an Jiaotong University | B.Eng. in EE, GPA 3.89 (90.78) | 2017.8 – 2022.7 |
| Tianjin Nankai High School | Honors Youth Program | 2016.8 – 2017.6 |
Honors
- First Prize, Quadruped Event, CN ROBOCON
- Third Prize, Throwing arrows into pots, CN ROBOCON
- First Prize, ROBO RUGBY 7s, CN ROBOCON
- First Prize, Quadruped Simulation Event, CN ROBOCON
- Second Prize, Shaanxi Division, CUMCM
Awards
- Outstanding Graduate, XJTU
- Ultra-High-Voltage Scholarship, 5/350
- Outstanding Student, XJTU
- Second-Class Scholarship, XJTU
Stable Multi-Terrain Humanoid Walking via Convex MPC
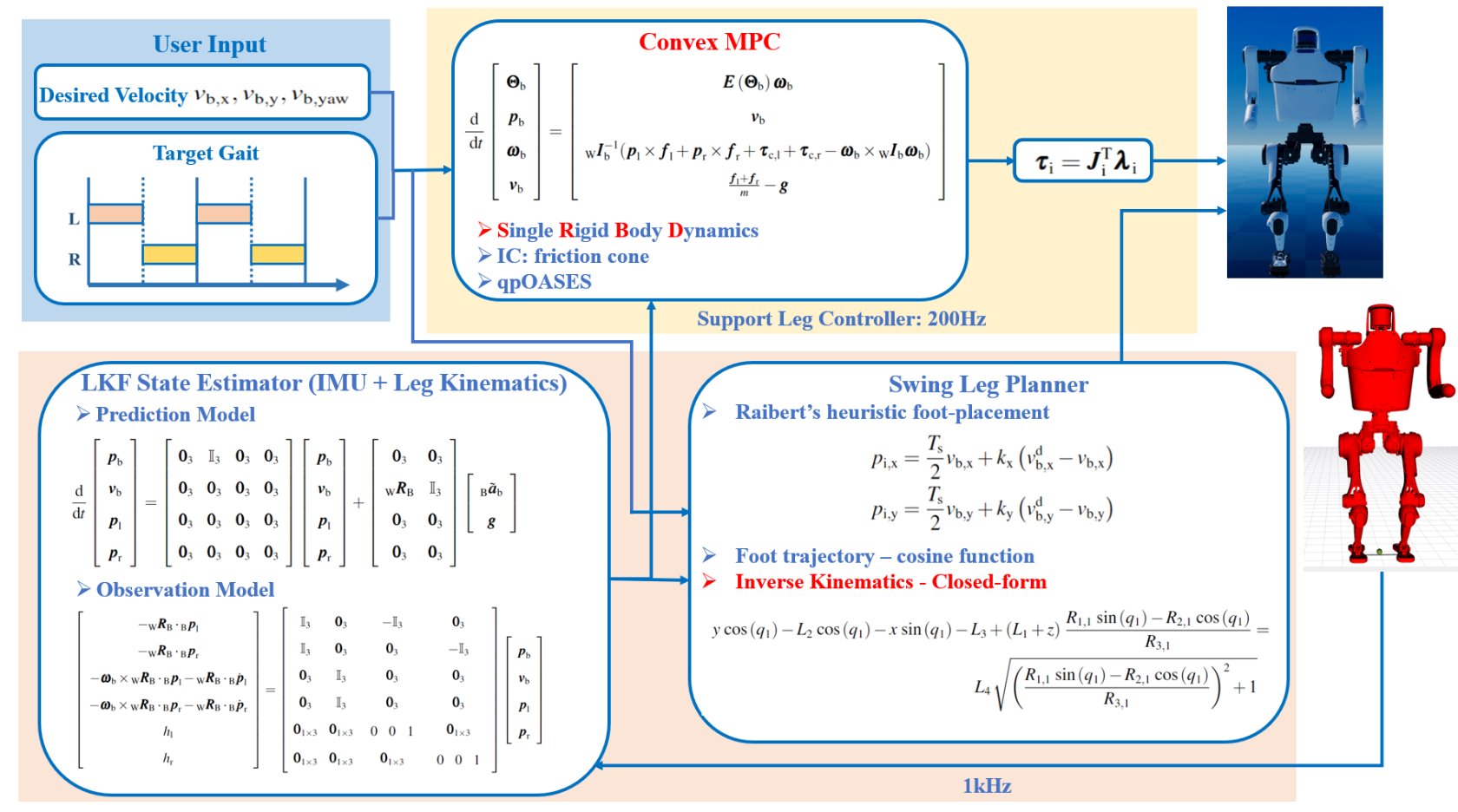
Achieving stable multi-terrain walking on tiles, soil, asphalt, and grass.
Withstanding external disturbances including pushes, kicks, steel pipes, speed bumps, and curbs.
Perception-Aware Multi-Terrain Humanoid Walking via Nonlinear MPC
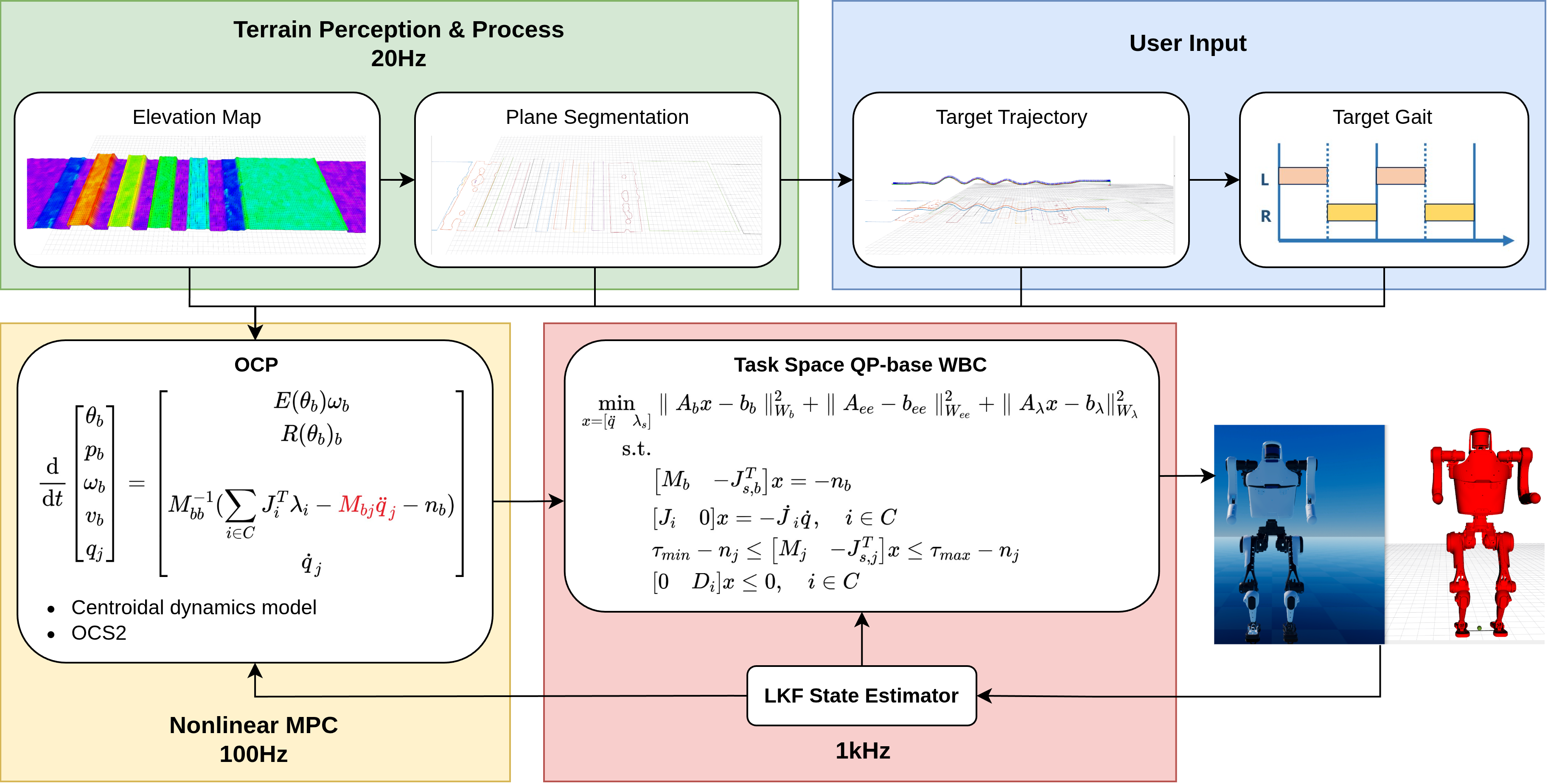
Increasing maximum forward speed from 1.0 m/s to 1.7 m/s.
Enabling traversal of 22° slopes and 25 cm steps in simulation.
Legged RL Deploy

Motion Viewer
- LAFAN1
- Unitree-LAFAN1-Retargeting
- AMASS
- OMOMO
- MimicKit
Publications
H. Wang, Q. Liao, B. Zhang, K. Ren, K. Sreenath, and X. Xiong. SPARK: Skeleton-Parameter Aligned Retargeting on Humanoid Robots with Kinodynamic Trajectory Optimization. Submitted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026.
S. Shin, K. Ren, X. Xiong, and J. Hanna. Articulated-Body Dynamics Network: Dynamics-Grounded Prior for Robot Learning. Submitted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026.
J. Kang, K. Ren, Tao Pang, and X. Xiong. PRIME: Physically-consistent Robotic Inertial and Motion Estimation for Legged and Humanoid Robots. Submitted to Robotics: Science and Systems, 2026.
R. G. Paiva, C. Ho, J. Kang, K. Ren, X. Xu, and X. Xiong. DASH Robot: Minimalistic Design and Optimal Aerial-Terrestrial Locomotion via Contact-Implicit Control. Submitted to IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2026.
- K. Ren, C. Tian, S. Chen, D. Zheng, and Y. Liu. An Analysis of Jumping Control Planning and Simulation for Quadruped Robots. Technology Innovation and Application, vol. 11, no. 17, pp. 1–8, 2021. (in Chinese)
Patents
Q. Zhu, K. Ren, Y. Yu, Y. Shen, Z. Yin, and J. Wu. A Closed-Form Method for Solving the Inverse Kinematics of a Six-DOF Multi-Link Mechanism (English translation). China Patent Application CN120386962A, under substantive examination since Aug. 15, 2025.
Q. Zhu, K. Ren, J. Wu, and R. Xiong. A Model Reference Adaptive Control-Based Variable-Load Standing Method for Humanoid Robots (English translation). China Invention Patent CN115616898B, granted Feb. 14, 2025.
Future Directions
General Motion Tracking:
- Improving tracking accuracy and robustness across diverse, high-dynamic motions.
- Related work: GAE, TWIST2, SONIC, OmniXtreme.
Motion Generation:
- Building scalable motion datasets from video or mocap data through dynamics-aware retargeting and editing.
- VLA: Generating motion commands with LLMs.
- Related work: GMR, OmniRetarget.
Object Interaction:
- Extending humanoid control to rich object-centric skills through perception-aware interaction.
- Related work: SkillMimic, HUSKY.
Learning-Based Simulation:
- Adapting simulators with real-world data to improve sim-to-real transfer.
- Related work: NeRD, RWM.
