上海创智学院掐尖生源面试
任坤照
rkzdtc@gmail.com | +1 608 590 6494
Madison, WI
Legged Robots | MPC | RL | WBC | RWM
Overview
- Background
- Research & Project Experience
- Publications & Patents
- Future Directions
Education Background
| University of Wisconsin-Madison | Ph.D. in ME | 导师: 熊晓滨 | 2025.8 – Present |
| 浙江大学 | M.Eng. in EI | 导师: 朱秋国, 云深处CEO | 2022.9 – 2025.6 |
| 西安交通大学 | B.Eng. in EE | GPA: Top 3% | 2017.8 – 2022.7 |
| 天津市南开中学 | 少年班预科 | 2016.8 – 2017.6 | |
Honors
- ROBOCON 2021 机器马术赛一等奖(四足)
- ROBOCON 2021 投壶行觞赛三等奖
- ROBOCON 2020 机器马术仿真赛一等奖(四足)
- ROBOCON 2020 绿茵争锋线上赛一等奖
Awards
- 西安交通大学优秀毕业生
- 特高压电网奖学金, 5/350
- 西安交通大学优秀学生, 二等奖学金
Research Experience 1: Stable Multi-Terrain Humanoid Walking via Convex MPC - 2023
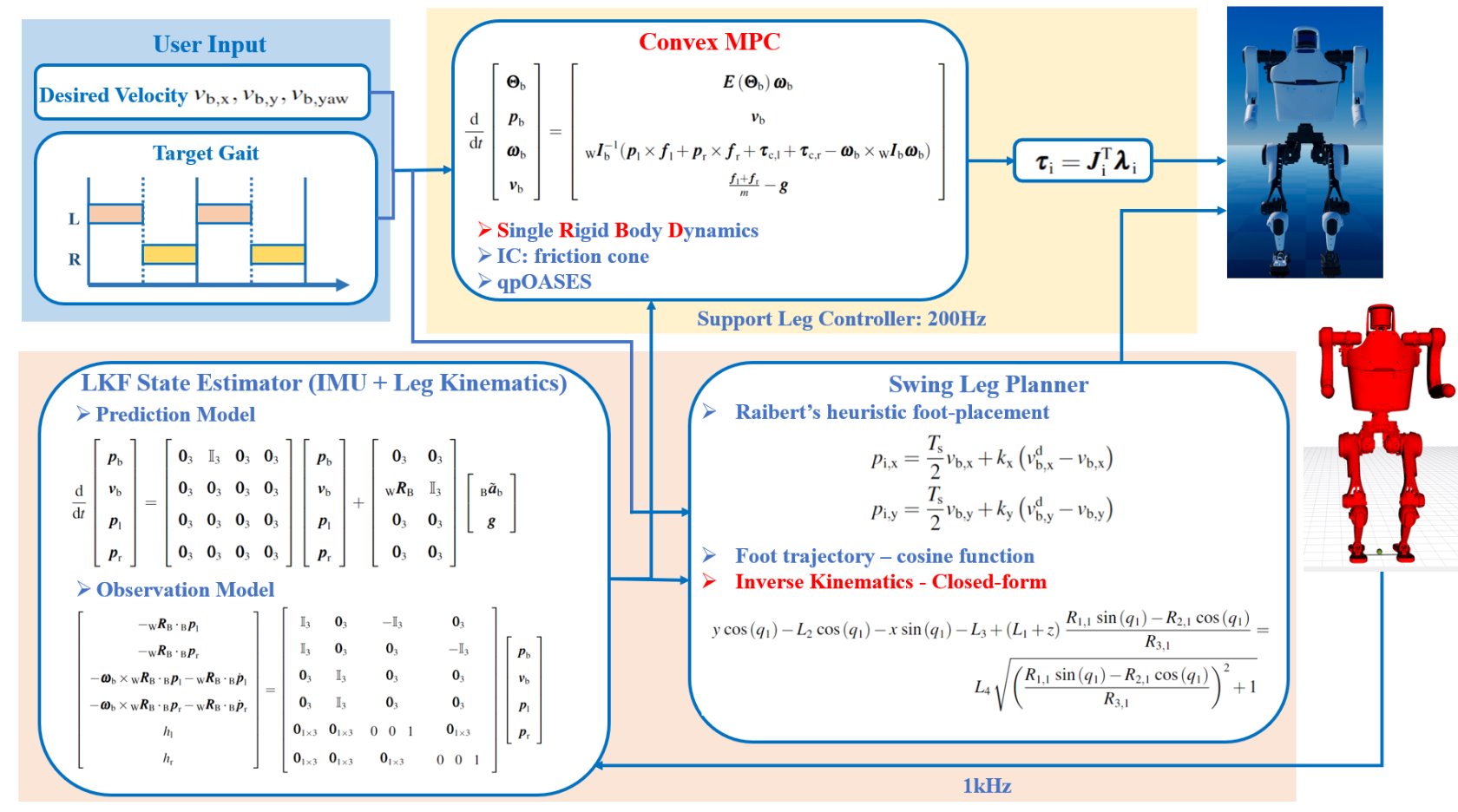
实现了悟空-IV在地砖、土地、沥青和草丛等地形上的稳定多地形行走, 能够抵抗推搡、踢踹、钢管敲击、减速带及路缘石等外部干扰
在亚运会上给外国领导人展示
Research Experience 2:
Perception-Aware Multi-Terrain Humanoid Walking via Nonlinear MPC - 2024
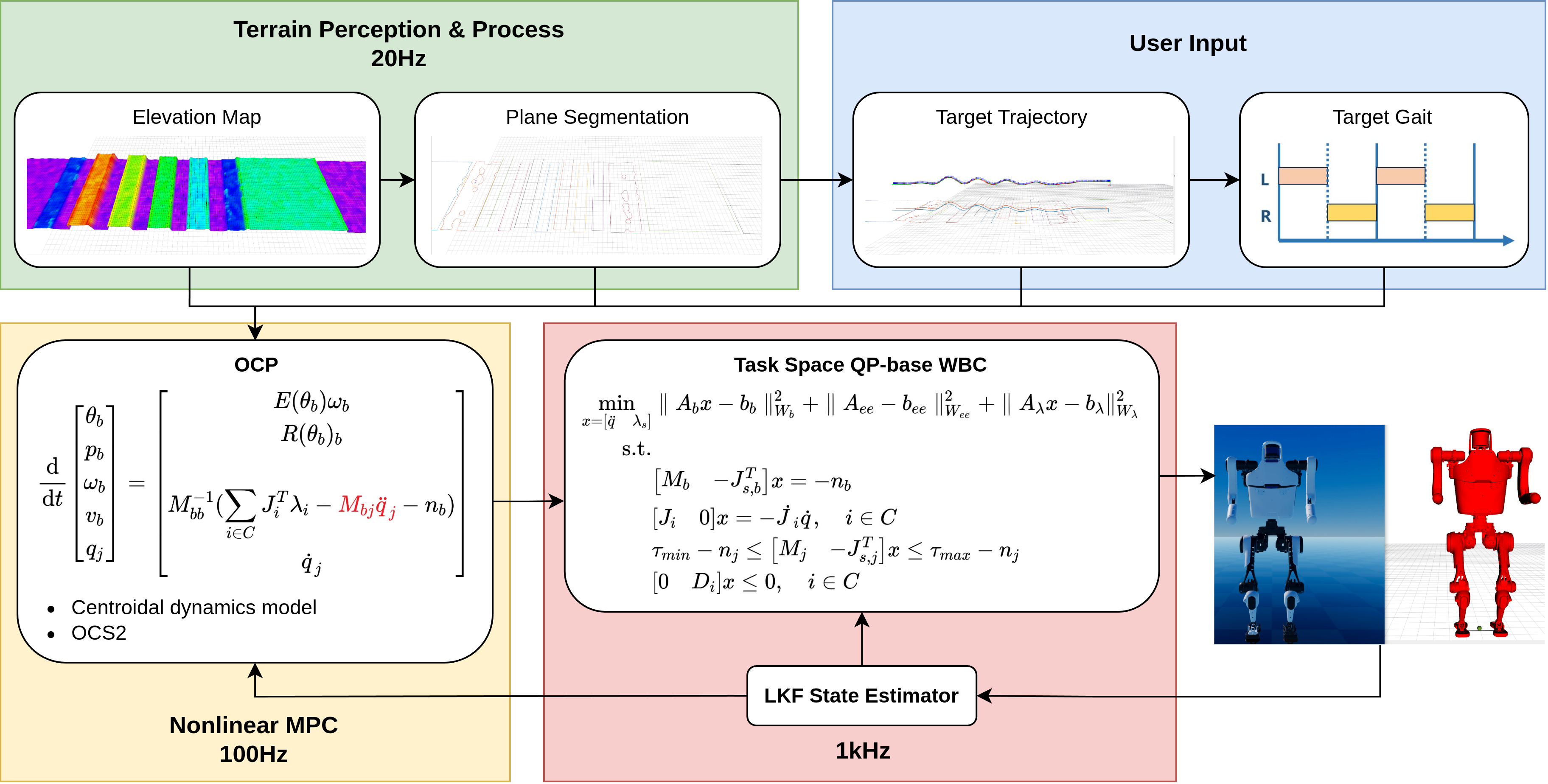
集成地形感知,使用质心动力学模型
- 最大前向速度提升70%
- 通过22$^\circ$ 坡面和25 cm 台阶
Project Experience 1: Motion Viewer
动作来源十分多样:
- 动捕数据、从视频中提取、生成式模型生成
格式也并不统一
| Dataset | Model | Motion |
|---|---|---|
| LAFAN1 | BVH | BVH |
| AMASS, OMOMO | SMPL | NPZ |
| Unitree-LAFAN1-Retargeting | URDF | CSV |
| MimicKit | URDF | PKL |
Motion Viewer 为各种来源、格式的动作提供统一可视化方式的静态网站。
Project Experience 2: Legged RL Deploy

通过中间层,硬件抽象层和策略抽象层三层架构设计,实现各种腿足机器人控制器的快速部署和Sim2Real迁移。
Publications
S. Shin, K. Ren, X. Xiong, and J. Hanna. Articulated-Body Dynamics Network: Dynamics-Grounded Prior for Robot Learning. Submitted to IROS 2026.
TL;DR: ABD-Net 用 ABA 的动力学传播结构来设计 policy 网络,从而让机器人控制学习得更快、更稳、也更容易泛化到真实机器和动力学变化。
J. Kang, K. Ren, Tao Pang, and X. Xiong. PRIME: Physically-consistent Robotic Inertial and Motion Estimation for Legged and Humanoid Robots. Submitted to RSS 2026.
TL;DR: PRIME 是一个面向腿足/人形机器人的离线物理一致性估计框架。它把测得的运动学轨迹、关节力矩等传感信息放进一个 MAP / Full Information Estimation 优化里,同时估计状态轨迹、接触力和惯性参数。
H. Wang, Q. Liao, B. Zhang, K. Ren, K. Sreenath, and X. Xiong. SPARK: Skeleton-Parameter Aligned Retargeting on Humanoid Robots with Kinodynamic Trajectory Optimization. Submitted to IROS 2026.
TL;DR: SPARK 提出了一种结合基于 URDF 的骨架对齐与渐进式运动-动力学轨迹优化的方法,用于从人类演示中生成自然且动力学可行的人形机器人运动参考。
R. G. Paiva, C. Ho, J. Kang, K. Ren, X. Xu, and X. Xiong. DASH Robot: Minimalistic Design and Optimal Aerial-Terrestrial Locomotion via Contact-Implicit Control. Submitted to IROS 2026.
TL;DR: DASH 提出了一种结合涵道风扇与弹簧腿的极简空地两栖机器人,实现了隐式模式切换的跳跃—飞行混合运动。
Publications
- 任坤照, 田春霖, 陈帅, 郑达, 刘岩. 四足机器人跳跃控制规划及仿真分析. 科技创新与应用, 2021, 11(17): 1–8.
Patents
朱秋国, 任坤照, 俞一诺, 沈尧杰, 殷泽邦, 吴俊. 一种六自由度多连杆结构的逆运动学闭式求解方法. 中国发明专利申请, CN120386962A, 2025.08.15(实审).
朱秋国, 任坤照, 吴俊, 熊蓉. 基于模型参考自适应控制的仿人机器人变负载站立方法. 中国发明专利, CN115616898B, 2025.02.14(授权).
Future Directions - Short Term
Trampoline Jumping
Future Directions - Long Term
Learning-Based Simulation:
- 利用真实世界数据学习动力学与接触模型,以弥合仿真器与现实差距,提升 sim-to-real 迁移效果。
- Related work: NeRD, RWM.
Environment/ Object Interaction:
- 结合感知系统,对物体/环境建模,进行精确、自适应的交互。
- Related work:
Future Directions - Long Term
Motion Generation: 根据提示词、运动学约束生成动作
- Challenge: 缺少数据集
General Motion Tracking: 跟踪任意动作的通用控制框架
- Challenge: 跟踪精度、鲁棒性、通用性差